Abstract
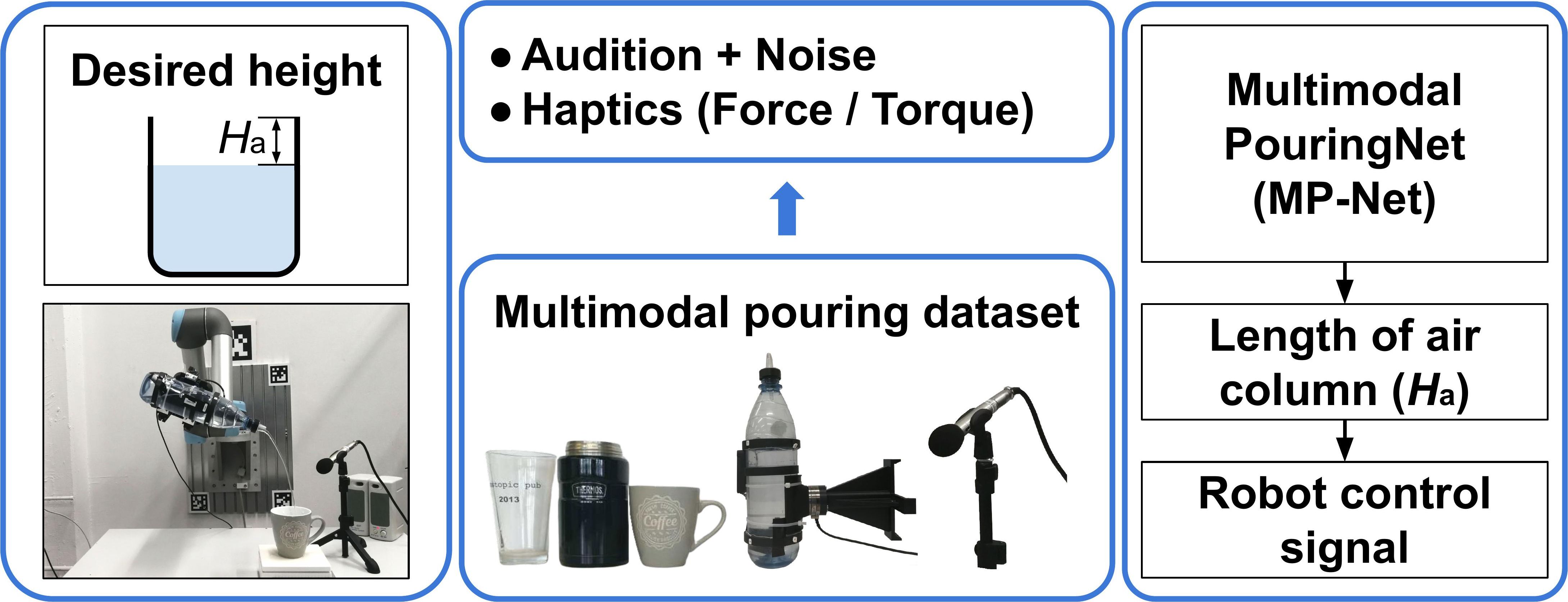
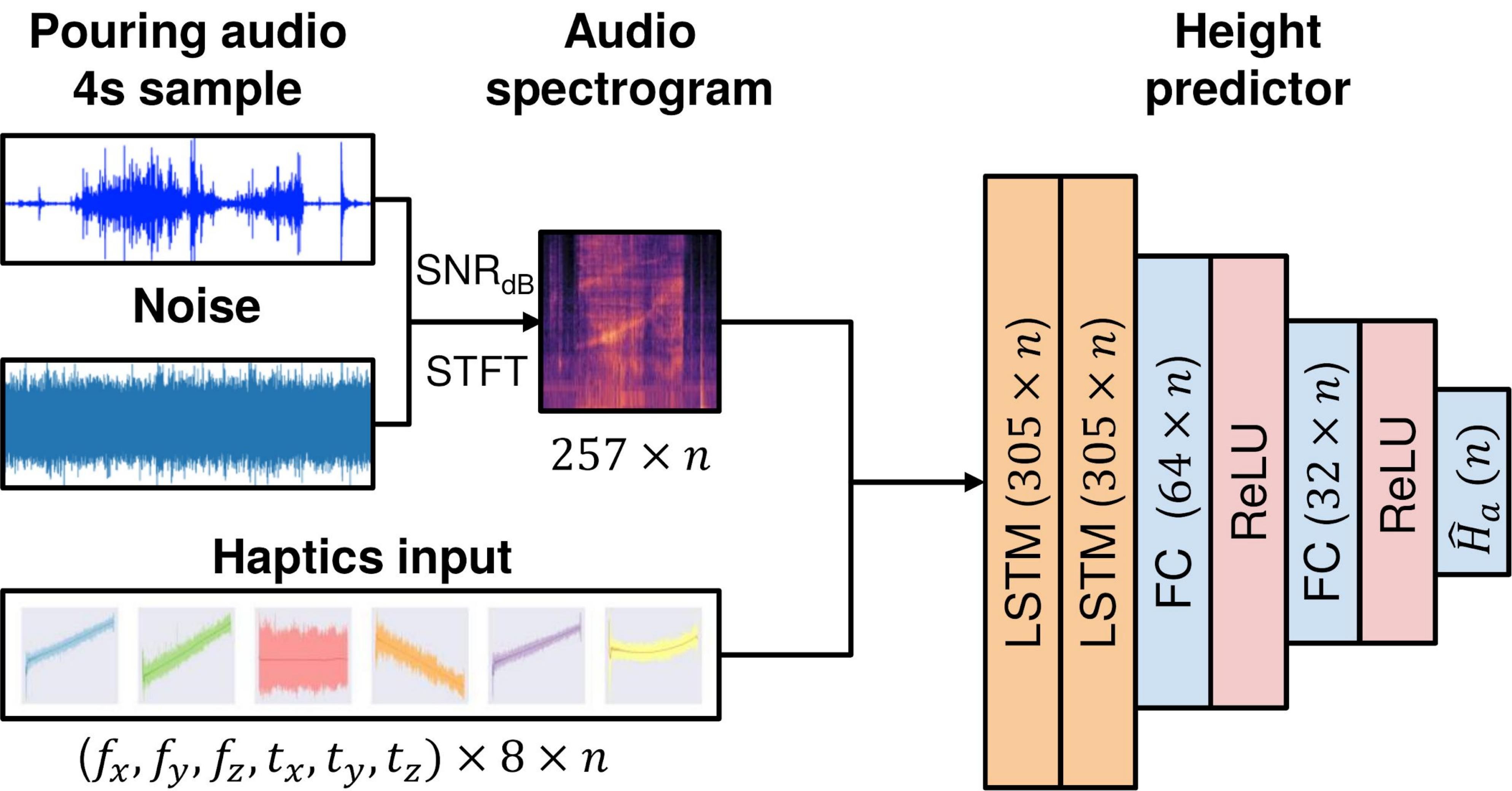
In this paper (arXiv, code, video), we focus on the robust and accurate estimation of liquid height for robotic pouring. However, vision-based methods often fail in occluded conditions while audio-based methods cannot work well in a noisy environment. We instead propose a multimodal pouring network (MP-Net) that is able to robustly predict liquid height by conditioning on both audition and haptics input. MP-Net is trained on a self-collected multimodal pouring dataset. This dataset contains 300 robot pouring recordings with audio and force/torque measurements for three types of target containers. We also augment the audio data by inserting robot noise. We evaluated MP-Net on our collected dataset and a wide variety of robot experiments. Both network training results and robot experiments demonstrate that MP-Net is robust against noise and changes to the task and environment. Moreover, we further combine the predicted height and force data to estimate the shape of the target container.
Overview
Video
Target containers

Dataset and experiment setup

Network
Code
Code of this project can be found at https://github.com/lianghongzhuo/MultimodalPouring.
Dataset
Please contact Hongzhuo Liang (liang[at]informatik.uni-hamburg.de) for the download link.
Citation
If you found this paper useful in your research, please consider citing:
@inproceedings{liang2020MultimodalPouring,
title = {Robust Robotic Pouring using Audition and Haptics},
author = {Liang, Hongzhuo and Zhou, Chuangchuang and Li, Shuang and Ma, Xiaojian and Hendrich, Norman and Gerkmann, Timo and Sun, Fuchun and Zhang, Jianwei},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2020},
pages = {10880-10887}
}